Smontando di tutto e di più, spesso ci si ritrovano tra le mani dei motori elettrici, magari recuperati da vecchi elettrodomestici e non si può fare a meno di chiedersi: come posso utilizzarli nei miei progetti?
La verità è che dietro a questa domanda c’è molto di più, perché ogni tipo di motore ha delle caratteristiche di funzionamento ben definite, che per poter lavorare in completa sicurezza bisogna conoscere e comprendere.
Quindi oggi parleremo di motori elettrici, scopriremo che cosa sono, quante tipologie ne esistono, come sono costituiti e come usarli.
Prima di iniziare una piccola premessa: questa non vuole essere un articolo super tecnico, bensì una panoramica sulle principali caratteristiche e possibili impieghi dei motori elettrici, per capirne il principio di funzionamento e scoprire come utilizzarli.
Cosa sono i motori elettrici e come funzionano?
Un motore elettrico può essere definito come una macchina elettrica rotante (ma non esclusivamente), che trasforma l’energia elettrica fornita attraverso i suoi morsetti di alimentazione, in energia meccanica resa disponibile sull’asse del motore.
Questa tipologia di macchina elettrica si basa sulle forze elettromagnetiche che interagiscono tra un sistema di correnti ed un campo magnetico.
In ogni motore è presente una parte fissa ed una mobile: statore e rotore, che in base al tipo di motore che si prende in considerazione, assumono il ruolo di indotto ed induttore.
In linea generale si può dire che l’induttore è colui che induce la f.e.m, ovvero la parte magnetizzante. L’indotto invece costituisce la struttura che sarà sede delle f.e.m. indotte.
I vari motori, tranne che in pochi casi, generalmente vengono definiti come delle “macchine”. Questo per indicare la reversibilità del loro funzionamento, di motore e generatore.
Comunque sia, oggi ci soffermeremo sul loro funzionamento da motore.
Quali sono le tipologie di motori esistenti?
Negli anni sono stati progettati e studiati diversi modelli di motori e ad oggi è possibile individuare 3 grandi famiglie di appartenenza:
- Motore sincrono
- Motore asincrono
- Motore a corrente continua
1.1 Motore sincrono
Si tratta di una macchina, generalmente trifase, doppiamente eccitata perché il suo avvolgimento di campo è eccitato da una sorgente CC separata.
In modo grossolano, per eccitazione, si intende “l’avvio” del motore.
La parte mobile ruota intorno ad un asse centrale e a causa della sua rotazione, si crea una richiusura delle linee di forza di campo (ad esempio per la presenza di un elettromagnete).
Trattandosi di una struttura rotante, è presente una spira ferma immersa in un campo magnetico di valore costante ma che ruota rispetto alla spira.
Se la spira dovesse rimanere ferma ed invece ruotare il campo, gli effetti non cambierebbero.
La velocità di funzionamento della macchina sincrona è strettamente legata alla frequenza della tensione generata o che viene applicata ai suoi morsetti.
Per una maggiore chiarezza di quest’ultima affermazione, prendiamo in considerazione il funzionamento da generatore (alternatore) e da motore:
- Con un funzionamento da generatore, la velocità di funzionamento è rigidamente legata alla frequenza della tensione generata.
Quindi se si fa ruotare il rotore della macchina con una certa velocità, essa genererà una determinata tensione con una certa frequenza. - Considerando il funzionamento da motore, la velocità di funzionamento è rigidamente legata alla frequenza della tensione che viene applicata ai morsetti di alimentazione.
Questo significa che se ad esempio ai morsetti si fornisce una determinata tensione con una certa frequenza, il rotore ruoterà con una certa velocità.
Esistono due configurazioni di sistema induttore: a poli lisci e a poli salienti.
Un motore sincrono con il sistema induttore a poli salienti, significa che dal punto di vista magnetico, la struttura non è magneticamente isotropa ed ha una bassa resistenza alle forze centrifughe.
Nello statore sono incagliate delle cave, in cui vengono collocate le bobine che saranno sede di f.e.m. e lo statore della macchina si presenta con un’alternanza dente-cava.
Questa alternanza, consente il posizionamento delle bobine ed una migliore richiusura delle linee di campo.
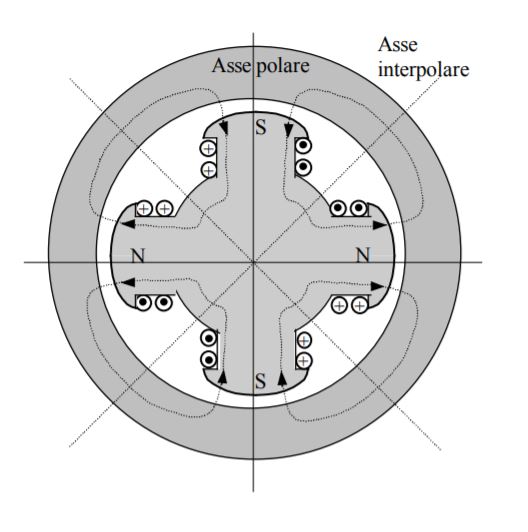
Immagine 1
A poli lisci, dal punto di vista magnetico la struttura è magneticamente isotropa e si ha un’alternanza tra i poli, realizzata attraverso degli avvolgimenti di eccitazione collegati tra di loro in serie, nei quali circoleranno delle correnti che possono essere entranti o uscenti.
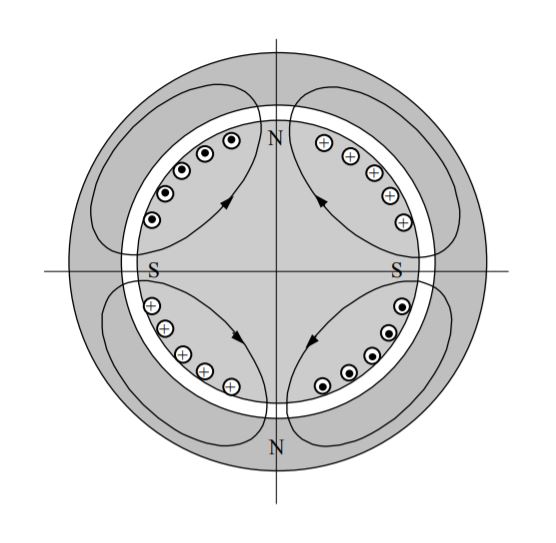
Immagine 2
Per capire meglio il ruolo di statore e rotore, si può considerare il caso in cui si vada a “muovere” il rotore, fornendo energia meccanica alla macchina (funzionamento da generatore).
Al movimento del rotore, il conduttore di statore (induttore) vedrà un campo magnetico variabile, perché vi è una rotazione reciproca tra rotore e statore.
1.2 Eccitazione delle macchine sincrone
Che si tratti di un motore sincrono monofase o polifase, per azionarlo, quindi per “farlo girare”, è necessario prevedere un sistema di eccitazione in corrente continua.
I sistemi di eccitazione per le macchine sincrone possono essere classificati come segue:
- Dinamo eccitatrice: nome che si attribuisce alla MS quando lavora da generatore (eroga corrente continua). Con questo metodo, si fornisce energia meccanica al generatore ad elettrica e la si fornisce al motore.
- Sistemi statici di raddrizzatori di potenza: si tratta del metodo più logico e moderno per l’eccitazione di un motore sincrono.
I circuiti raddrizzatori prelevano una piccola quantità di corrente dalla rete, la raddrizzano e la forniscono alla macchina.
In questo caso, la macchina parte grazie al magnetismo residuo. - Magneti permanenti: In genere vengono utilizzati per motori di piccola potenza, utilizzano livelli di eccitazione più bassi, sono più costosi e non è possibile regolarne il flusso.
- Eccitazione criogenica: alcuni materiali conduttori se vengono portati a temperature di criogenia, annullano la loro resistenza ed una volta eccitato il sistema, la corrente circolerà senza incontrare alcuna resistenza.
Per ogni macchina reale che si rispetti, durante il funzionamento si verificano delle perdite, che devono essere limitate il più possibile, che nel caso di un motore sono date:
- Per effetto joule nei circuiti di indotto ed induttore;
- Per isteresi e correnti parassite nel circuito magnetico di indotto e sulla parte più estrema dell’espansione polare (scarpe polari dell’induttore), che risentono delle pulsazioni di flusso causate dalla dentatura dell’indotto;
- Per attrito e ventilazione, a causa della rotazione del rotore;
2 Macchina asincrona
Il motore asincrono è una macchina molto semplice, anch’essa costituita da uno statore ed un rotore.
La sua velocità di rotazione non è strettamente correlata alla frequenza di rete.
Generalmente si preferisce utilizzare dei motori asincroni trifase, i quali richiedono una manutenzione pressoché nulla, il che li rende i candidati perfetti in applicazioni che prevedono l’inserimento di motori in delle zone poco accessibili.
Per piccole e medie potenze, a parità di coppia prodotta, risultano più piccoli e più leggeri rispetto ai motori a corrente continua.
In questa tipologia di motore, l’alimentazione viene fornita attraverso lo statore, che è realizzato nello stesso modo di quello dei motori sincroni.
Invece il rotore può avere 3 diverse tipologie costruttive. Nello specifico:
- Avvolto;
- A barre alte o cave profonde;
- A Gabbia (a. singola o b. doppia);
- Ad addensamento di corrente;

Anche in questo caso non esiste un tipo di motore migliore rispetto ad un altro, ma ognuno presenta sia dei vantaggi che svantaggi, che possono renderlo più o meno idoneo ad un determinato campo di utilizzo.
2.1 Motore asincrono con rotore avvolto
I motori con rotore avvolto presentano dei problemi in fase di avviamento non indifferenti ed un circuito rotorico fortemente induttivo, situazione che può essere migliorata regolando dall’esterno la componente attiva, in modo classico tramite un reostato di avviamento.
Essendo il circuito rotorico posto in rotazione, il primo sistema per permettere il collegamento tra parte rotante e fissa è quello delle spazzole-anello.
Il vantaggio di questo tipo di rotore è dato dalla possibilità di poter regolare facilmente dall’esterno la resistenza, attraverso l’aggiunta di un reostato.
L’aspetto negativo è che soffre all’avviamento senza il reostato. Infatti la rete vede la macchina come un carico molto induttivo e poco reattivo che assorbe quindi molta potenza reattiva ed una piccola quantità di energia attiva.
La potenza reattiva dissipata comporta un grande riscaldamento e all’inizio la coppia risulta essere limitata.
Il surriscaldamento, che è una vera e propria perdita, può causare il danneggiamento dei materiali isolanti, con conseguenti cortocircuiti e il danneggiamento stesso della macchina.
2.2 Motore asincrono con rotore a gabbia di scoiattolo
Scegliere un motore con rotore a gabbia “di scoiattolo”, permette di avere una struttura che evita il serraggio nella posizione di minima riluttanza, in modo tale che da fermo, per avviarlo non sia presente un’ulteriore coppia resistente da dover superare, causata delle posizioni di minima energia che altrimenti assumerebbe.
Per questo motivo, la struttura del rotore è costituita da delle assi disassate rispetto la direzione di rotazione della macchina.
Il vantaggio principale sta nel fatto che si tratta di una macchina molto robusta dal punto di vista meccanico e non è necessaria molta manutenzione, mentre il suo svantaggio è che dalla rete, il carico viene visto come fortemente induttivo e poco resistivo.
Di conseguenza all’avviamento si avrà una piccola coppia motrice, il che limita il campo di utilizzo di questa tipologia di motore.
Per questo motivo può essere impiegato ad esempio per la costruzione di ventole, che hanno una coppia motrice bassa.
N.B. Se il motore ha una coppia motrice che all’avviamento risulta essere più bassa di quella del carico, non si avvierà, ma si brucerà.
2.3 Motore ad addensamento di corrente
Appartengono a questa categoria i motori a doppia gabbia di scoiattolo e i motori a barre alte o a cave profonde.
Come dice il nome, è presente un addensamento della corrente.
All’inizio la corrente dovrebbe addensarsi nella gabbia esterna, perché avendo la sezione di rame più piccola, presenterà un valore di resistenza più elevato.
Se all’avviamento si riesce a far addensare la corrente sulla gabbia esterna ed una volta entrato a regime su quella interna, si otterrebbe un effetto simile a quello del reostato.
La corrente sarà maggiore dove l’impedenza è minore.
Tra i vantaggi di questa macchina, oltre alla sua robustezza e la possibilità di funzionamento a velocità elevate, il più importante è che risolve il problema della coppia all’avviamento, che è maggiore di quella a semplice gabbia.
Lo svantaggio riguarda la sua costruzione più complicata.
2.4 Regolazione della velocità dei motori asincroni
Il motore asincrono è molto robusto ma poco elastico. Nonostante ciò, in alcune applicazioni risulta essere indispensabile poter regolare la velocità di rotazione.
I metodi più efficaci per la regolazione della velocità sono tre, ognuna con i propri pro e contro:
- commutazione dei poli;
- metodo Kramer;
- impiego di convertitori statici.
2.4.1 Commutazione dei poli
Si tratta di un metodo di regolazione discreta, che si può esercitare impiegando un sistema di contattori che, agendo negli avvolgimenti statorici, ne commuta le connessioni in modo da ottenere un numero di poli differente.
Al cambiamento del numero dei poli, ne consegue che cambierà anche la velocità di rotazione
2.4.2 Metodo Kramer
Questo metodo può essere utilizzato esclusivamente per la regolazione della velocità del motore asincrono con rotore avvolto, che utilizza dei contatti striscianti e presenta una f.e.m. isofrequenziale.
Si inietta una fem in opposizione di fase, che provoca una riduzione della corrente e di conseguenza una riduzione delle interazioni elettrodinamiche ed il rallentamento del motore, che raggiunge una nuova condizione di equilibrio ad una velocità diversa.
2.4.3 Variazione della frequenza a mezzo di convertitori statici
Questo è uno dei metodi “più moderni”, che permettono di avere il pieno controllo sui motori che si vogliono gestire.
Naturalmente si tratta di un metodo per il quale bisogna prestare parecchia attenzione, progettando un convertitore statico di potenza che sia in linea con il carico da gestire.
Infatti tra gli svantaggi, si ha che le grandezze fornite dai convertitori statici tendono ad essere fortemente distorte. In alcuni casi ciò può causare molti problemi e portare alla riduzione della coppia motrice erogata dalla macchina.
2.5 Invertire il senso di rotazione
Per invertire il senso di rotazione di un motore asincrono è necessario invertire il senso di rotazione del campo magnetico rotante: è sufficiente scambiare il collegamento di due fasi del sistema di alimentazione. Ciò può avvenire mediante commutatori o tramite il comando di due contattori, attivati uno per la marcia in senso orario e l’altro in senso antiorario
3 Macchina a corrente continua
La macchina a corrente continua fu sviluppata da Pacinotti ed è una macchina rotante, che prevede un’alimentazione a corrente continua. Risulta essere particolarmente complicata, ma indispensabile per alcune applicazioni, in quanto la sua regolazione risulta abbastanza semplice.
Facendo riferimento all’anello di Pacinotti, il suo funzionamento si basa su un anello inserito all’interno di un circuito magnetico che crea una espansione polare mezzo nord ed una sud.
L’anello viene considerato come la parte rotorica, mentre il resto come la parte statorica.
La presenza nello spazio circostante alla parte vuota dell’elemento ferromagnetico fa sì che le linee di campo si addensino lungo i percorsi ferromagnetici.
Il meccanismo di prelievo, avviene tramite un sistema di spazzole.
3.1 Eccitazione
Quattro tipi di eccitazione:
- Eccitazione indipendente;
- Eccitazione derivata;
- Eccitazione serie;
- Eccitazione composta;
3.1.1 Eccitazione indipendente e derivata
I motori a corrente continua con eccitazione indipendente e in derivazione, alimentati a tensione costante, vengono generalmente impiegati quando è necessario, per qualsiasi condizione di carico, mantenere una velocità di rotazione praticamente costante, come per l’azionamento degli organi di macchine utensili, pompe, ventilatori ecc.
3.1.2 Eccitazione serie
Essendo l’eccitazione in serie, il flusso risulta essere proporzionale alla corrente.
Quando un motore con eccitazione serie viene posto sotto carico, la corrente nell’indotto aumenta ed insieme a essa, anche la corrente di eccitazione.
Quindi il motore a corrente continua con eccitazione in serie presenta una coppia di spunto elevata che decresce rapidamente all’aumentare del numero di giri.
Il numero di giri del motore varia al variare della corrente e quindi del carico.
Questa proprietà risulta particolarmente utile nei casi in cui il motore deve essere utilizzato per l’azionamento di carichi gravosi allo spunto, come ad esempio nella trazione elettrica o negli organi di sollevamento.
Bibliografia:
Immagine 1 e 2 : http://www.die.ing.unibo.it/pers/breschi/Pdf/sincrone.pdf
Immagine 3: https://upload.wikimedia.org/wikipedia/commons/5/51/Various_motor_rotor_TICI.jpg